
Il metodo del picco ponderato - Aspetti generali
Valori di Azione del D.Lgs.159/2016 integrati con i livelli di riferimento ICNIRP-2014
Vedi anche la discussione di esempi basati su forme d'onda provenienti da misure reali o costruite ad hoc
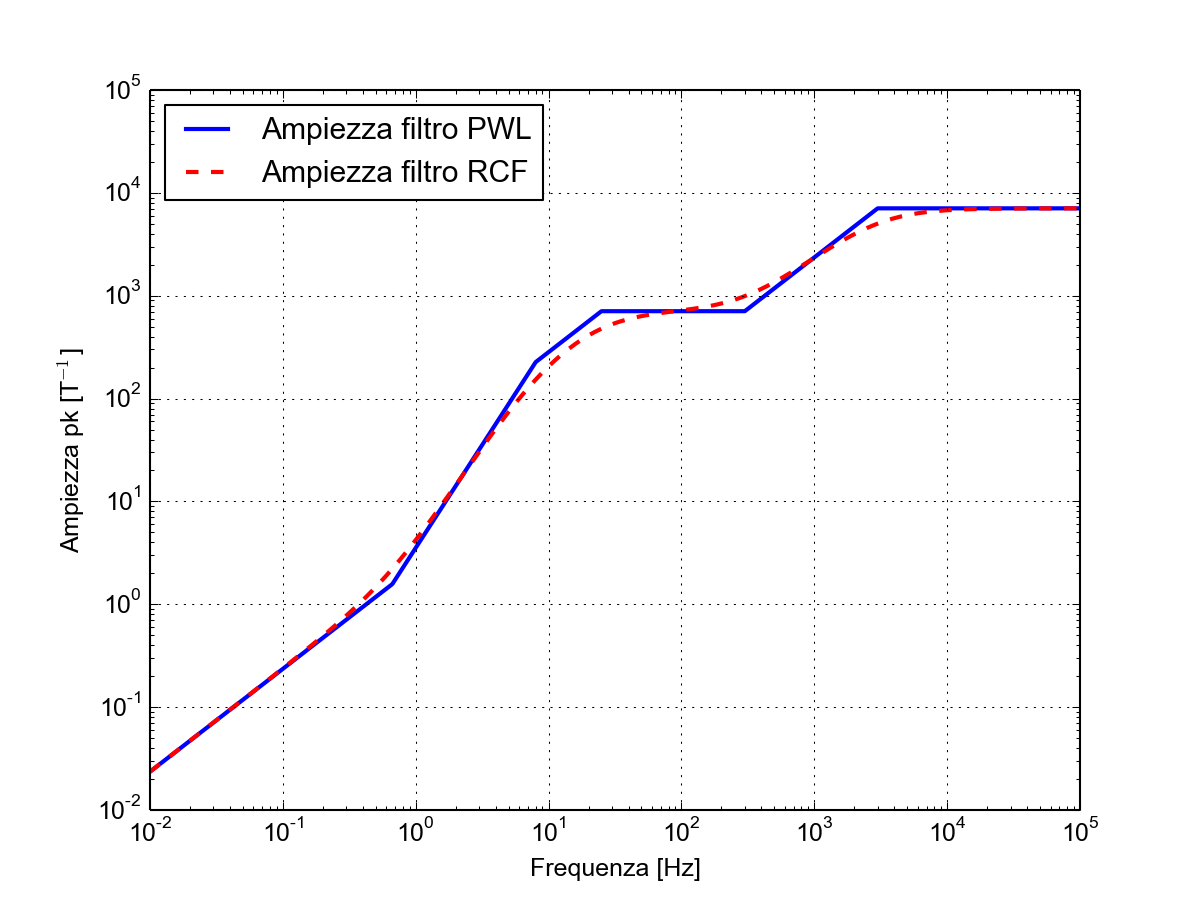
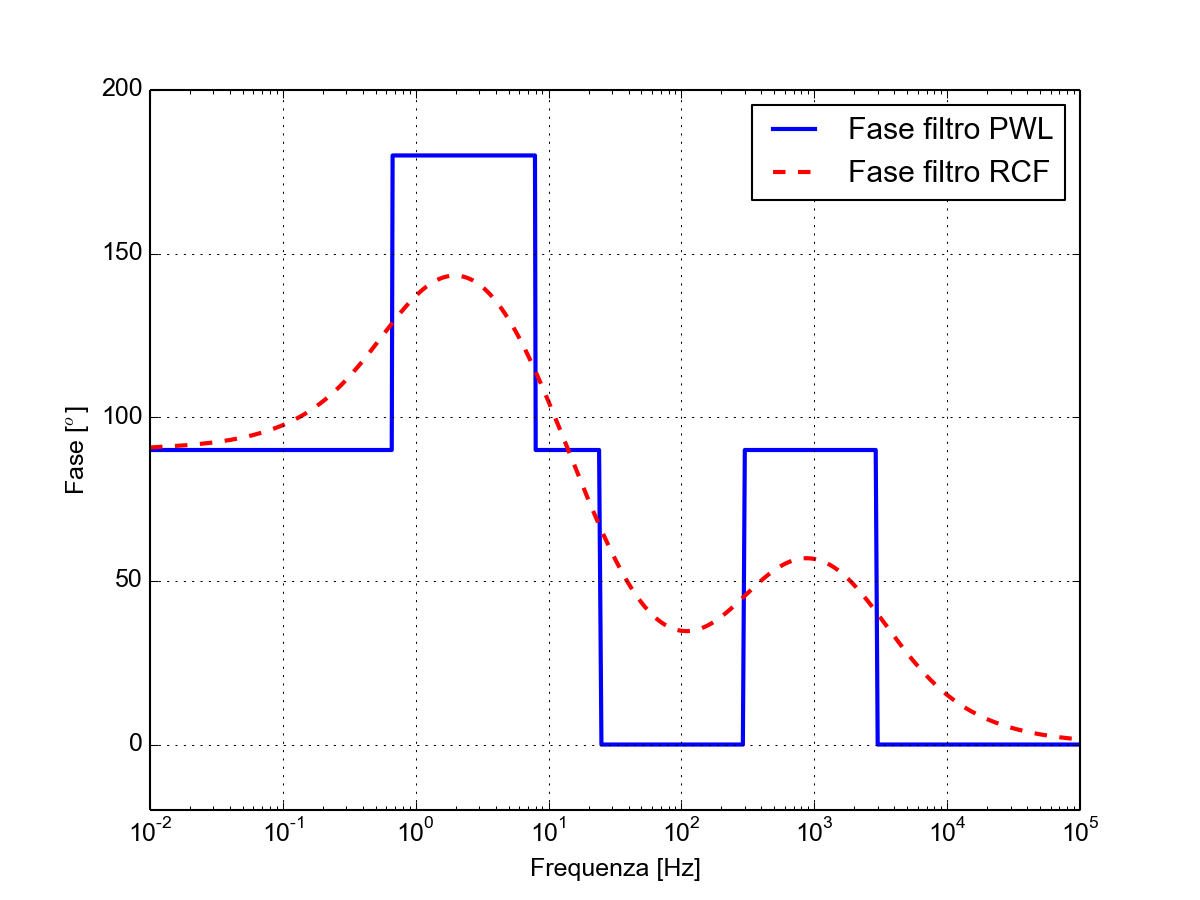
Specifiche del filtro per l'indice di picco ponderato per l'induzione magnetica, relativo agli effetti sensoriali, calcolato nel dominio della frequenza
| Intervallo di frequenze (Hz) | D.Lgs.159/2016 VA inferiori+ICNIRP-2014 Controlled Reference Levels | |||
|---|---|---|---|---|
| Valore limite |
Funzione peso |
Funzione peso |
||
| Ampiezza (T-1 pk) | Fase (°) | Guadagno complesso (T-1 pk) | ||
| 0 < f < $2/3$ | $$0.3/f$$ | $${5\√2f}/3\±3dB$$ | $$+90\±90$$ | $${5000\√2}{jf(2/3+jf)(300+jf)}/{(8+jf)(25+jf)(3000+jf)}$$ |
| $2/3$ ≤ f < 8 | $$0.2/f^2$$ | $${5\√2f^2}/2\±3dB$$ | $$+180\±90$$ | |
| 8 ≤ f < 25 | $$0.025/f$$ | $$20\√2f\±3dB$$ | $$+90\±90$$ | |
| 25 ≤ f < 300 | $$0.001$$ | $$500\√2\±3dB$$ | $$0\±90$$ | |
| 300 ≤ f < 3000 | $$0.3/f$$ | $${5\√2f}/3\±3dB$$ | $$+90\±90$$ | |
| 3000 ≤ f < 10M | $$0.0001$$ | $$5000\√2\±3dB$$ | $$0\±90$$ | |
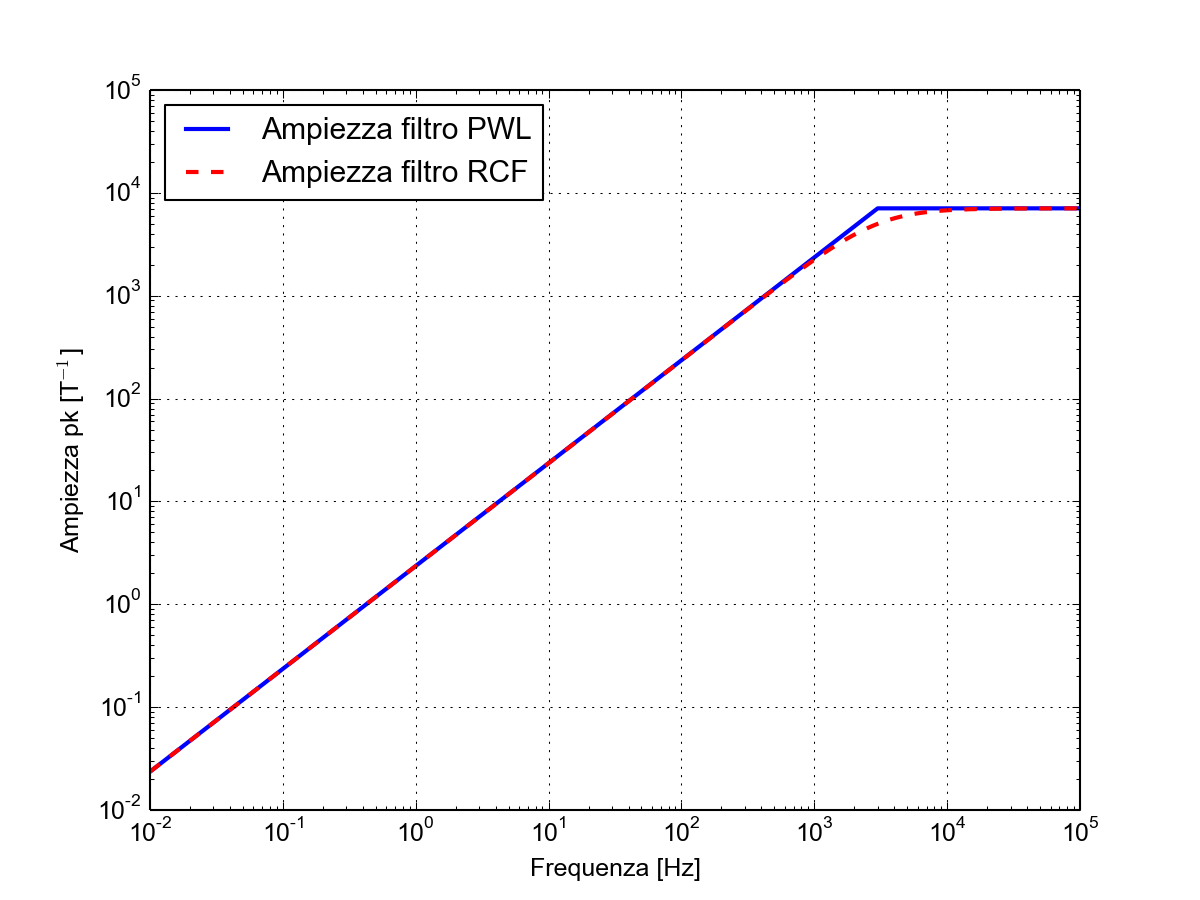
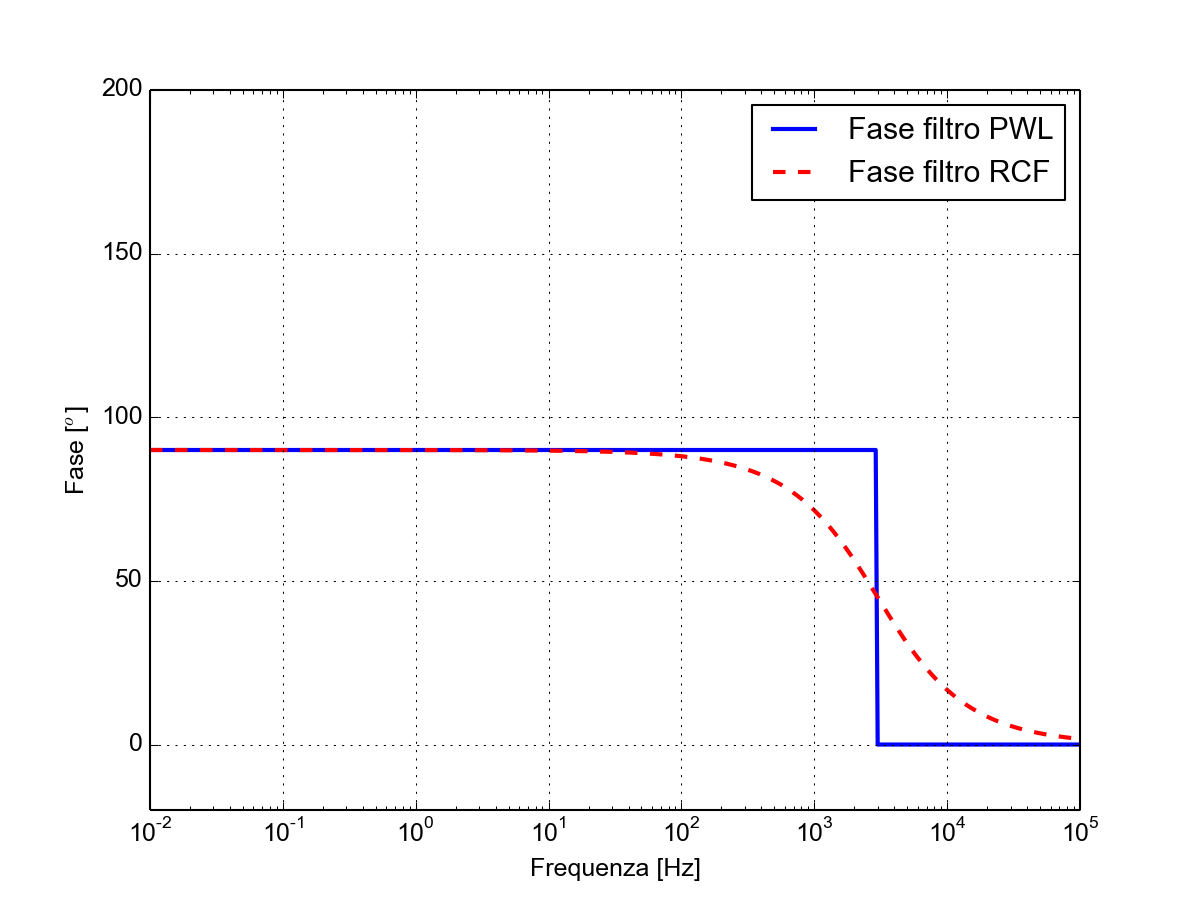
Specifiche del filtro per l'indice di picco ponderato per l'induzione magnetica, relativo agli effetti sanitari, calcolato nel dominio della frequenza
| Intervallo di frequenze (Hz) | D.Lgs.159/2016 VA superiori+ICNIRP-2014 Controlled Reference Levels | |||
|---|---|---|---|---|
| Valore limite |
Funzione peso |
Funzione peso |
||
| Ampiezza (T-1 pk) | Fase (°) | Guadagno complesso (T-1 pk) | ||
| 0 < f < 3000 | $$0.3/f$$ | $${5\√2f}/3\±3dB$$ | $$+90\±90$$ | $${5000\√2jf}/{3000+jf}$$ |
| 3000 ≤ f < 10M | $$0.0001$$ | $$5000\√2\±3dB$$ | $$0\±90$$ | |
Espressione generale dell'indice di picco ponderato calcolato nel dominio della frequenza
$$WPI=Max[WP(t)]$$
$$WP(t)=\√{WP_x^2(t)+WP_y^2(t)+WP_z^2(t)}$$
$$WP_{x,y,z}(t)=∑_i{B_{x,y,z}(f_i)}/{B_L(f_i)\√2}
cos[2\π f_it+\θ_{x,y,z}(f_i)+ \φ(f_i)]$$